
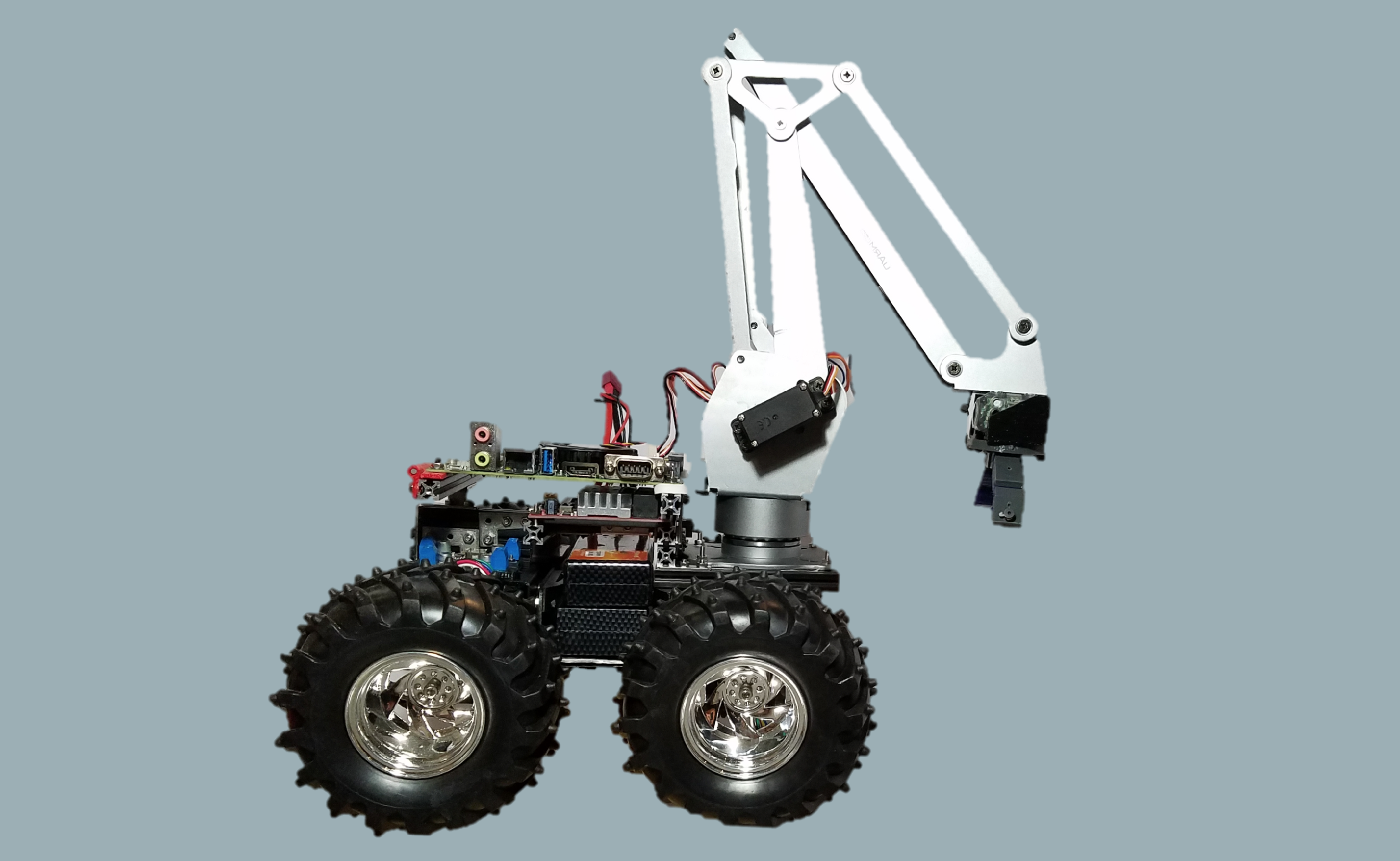
Autonomous Construction with Amorphous Bags [9/16 - present]
I worked with Maira Saboia, Vivek Thangavelu, and my advisor, Dr. Nils Napp, to create a mobile robot that is capable of building a ramp out of amorphous bags discovered within its surroundings (first image). My personal contributions were the design and construction of the rover itself, and assisting with developing a control scheme for the rover. Presently, I am creating a second iteration of the rover to improve handling, navigation, and grasping performance (second image). This work was submitted to ICRA 2018 in a paper titled "Adaptive Autonomous Robotic Construction of Access Ramp in Irregular Terrain Using Compliant Bags." Additionally, I presented my contributions to the project at NERC 2017 and NASEC 2017 in "A Robotic Platform for Evaluating Autonomous Construction Methods."
View PosterExperimental Characterization of microQuad Running [5/17 - 8/17]
In the Microrobotics Laboratory at University of Maryland, I worked with Ryan St. Pierre and Dr. Sarah Bergbreiter towards a better understanding of legged locomotion on the milligram scale. I performed and recorded experimental trials with the smallest ever walking robot, the microQuad, and used this experimental data to inform simple mathematical models of the robot. Although there are many existing mathematical models to describe legged locomotion, none of the models adequately characterized the movement I extracted from the experimental trials. Therefore, I developed several novel models that were better able to represent this locomotion. This data has led to a better understanding of the way the microQuad moves, which has informed experimental changes towards more effective locomotion at this scale. The work was submitted to MEMS 2018 in a paper titled "A 3D-printed 1 mg microrobot running at 15 body length/sec." A paper I wrote detailing my contributions and giving an overview of the work is here.
View Paper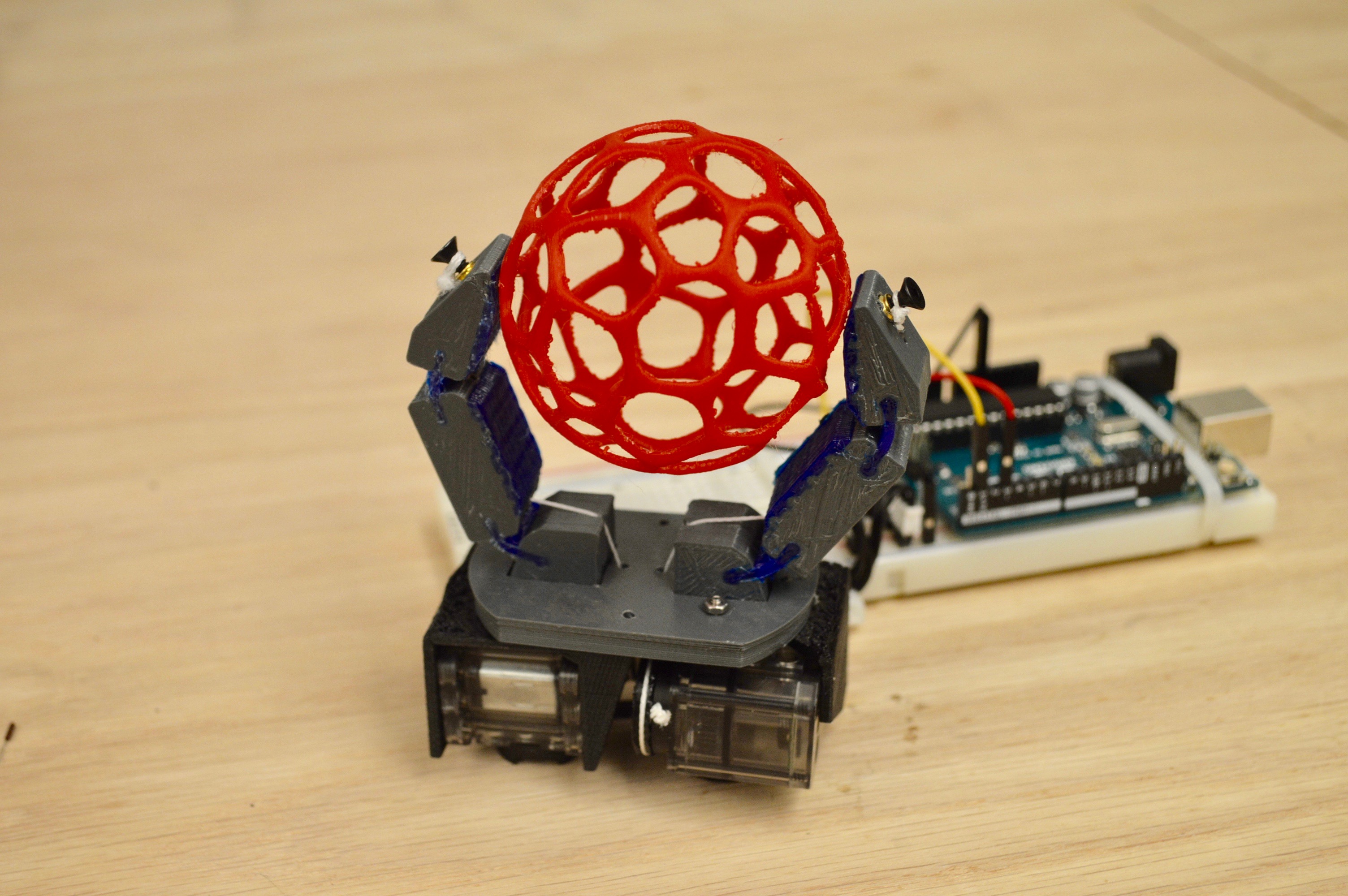
Robotic Hand Research [9/15 - 5/17]
I created a fully 3D-printable, parameterized gripper design based on the Yale OpenHand gripper. I designed a system to optimize the gripper parameters towards any specific gripping task, leveraging the full potential of 3D-printing for grippers. I wrote about it in "A Fully Integrated Gripper Optimization System", for which I won second prize in the Silent Hoist and Crane Material Handling Paper Competition. I also worked to integrate distance and pressure sensors into the gripper to improve gripping characteristics.
View Paper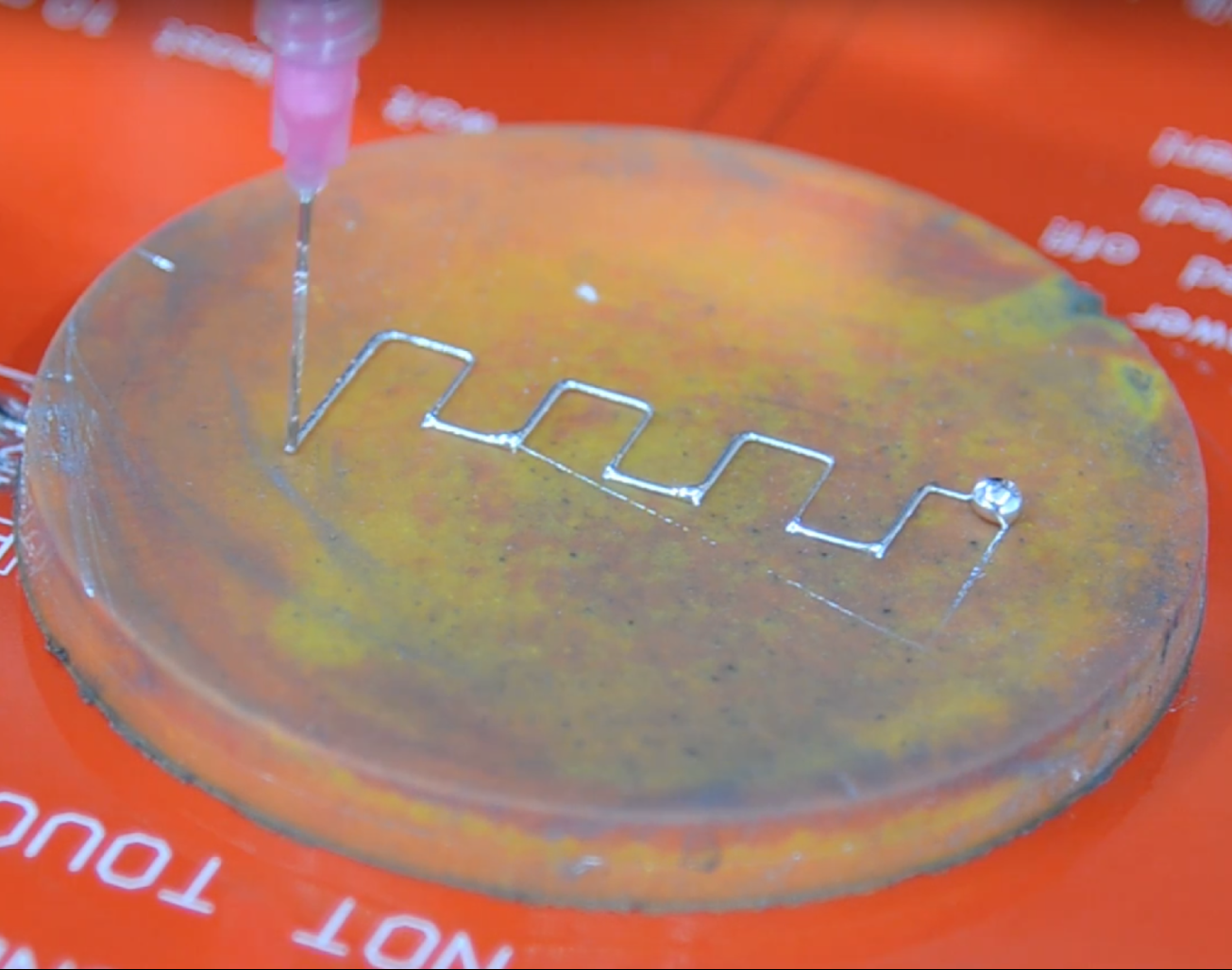
Liquid Metal 3D Printer for Soft Robots [5/16 - 8/16]
I developed a novel liquid metal 3D printer and printing process for eGaIn, an alloy of Indium and Gallium which is liquid at room temperature. The printer lays down liquid metal to create wiring that can be used to additively create circuitry in soft robots. This printer is a part of a system to completely 3D print soft robots being developed at Oregon State University. I presented this work at NERC 2016, in "A Novel Liquid Metal 3D Printer". I also contributed to a paper on the subject, submitted to IEEE RoboSoft 2018.
View Poster